

 QQ
QQ
发那科 | 通过PC Developer’s Kits读写FANUC机器人IO
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
信息化是现代制造业的非常重要的趋势。我们在集成机器人的时候,总希望尽可能多的采集机器人信息,以还原机器人的原貌,从而对机器人进行分析,做出接下来的决策。FANUC为各位提供了PC操作机器人的软件接口—PC Developer’s Kits(以下简称PCDK)。

PCDK是使PC和FANUC机器人系统高效通讯的功能强大的软件工具,既可用于开发又可用于运行环境。它在Windows系统中快速运行,并且可以满足绝大部分需求。PCDK包含几种PC与机器人控制器的接口:FTP、ECBR,Robot Server等。其中FTP、ECBR用于机器人文件的维护,而Robot Server用于读写变量、读写IO、与用户程序协调合作,监控报警、控制流程、修改位置。我们使用Robot Server来读写机器人IO。
通过PCDK读写FANUC机器人IO,采用的是面向对象的编程方法。PCDK内的Robot Server组件提供对象类FRCRobot(FRC表示Fanuc Robotics Class,是Robot Server内所有对象类名称的前缀)。编程者可以通过实例化该类的对象(以下称为gobjRobot对象)来连接机器人并通过该对象的属性和方法来获取机器人信息以及控制机器人。创建objRobot对象后,可以获取该对象的一个属性“FRCRobot.IOTypes”的引用,该属性是我们完成机器人IO信息读写的关键所在。具体步骤如下:
1)确保PC与机器人控制器之间的以太网物理连接。
2)创建及共享一个“FRCRobot”的引用:
Set gobjRobot= New FRCRobot
3)调用 “FRCRobot.Connect”方法来建立PC与机器人的连接:
gobjRobot.Connect ”robotname”
4)通过 “FRCRobot.Disconnect”事件来处理不连接的状态。
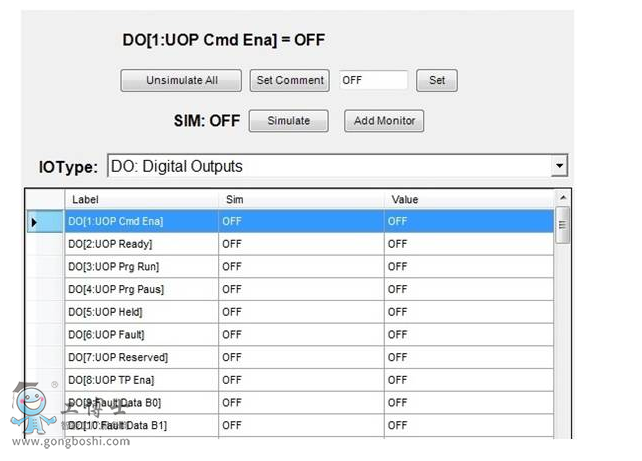
5)通过“FRCRobot.IOTypes”读写IO。以给DO(1)赋值取反为例:
Dim objDigOut1 As FRCDigitalIOSignal
Set objDigOut1=gobjRobot.IOTypes.Item(frDOutType).Signals(1)
objDigOut1.Value = Not objDigOut1.Value

图中FRCRobot是“RobotServer”组件中**可被外部创建的对象类。任何需要和机器人控制器交互信息的应用,都需要通过这个类来获得引用。FRCIOTypes和FRCIOSignals均为对象集合,前者包含了机器人控制器中所有已设置的I/O类型,譬如AI、AO或DI、DO等类型,后者则包含了属于某一特定I/O类型的所有I/O信号,例如所有属于DI类型的I/O信号。值得注意的是FRCRobot.IOTypes属性即一个FRCIOTypes类对象。
发那科喷涂应用的上位机软件PaintWorks4是一套功能完备的机器人和涂装工艺设备管理软件,它正是采用PCDK来采集机器人数据,控制机器人部分功能。以下是其中一个子程序RobotI/O,其作用就是对机器人IO进行操作,这个功能正是采用了上述的方法。
读写机器人IO是PCDK提供的功能中的比较基础的一项。PaintWorks4软件,除了IO读写功能以外,还具有可以读写机器人的变量,修改工艺参数,操作机器人文件等功能。
总之,PCDK可以在编写PC读写控制机器人的上位机程序时,给编程者提供了很大的便利。
了解更多发那科喷涂机器人请点击:发那科喷涂机器人
